分散処理モードの線形回帰は、訓練段階でのみ使用できます。
この計算モードは、データセットが計算ノードの nblocks ブロックに分割されていると仮定します。
訓練
アルゴリズムのパラメーター
訓練段階での分散処理モードの線形回帰のパラメーターは次のとおりです。
パラメーター |
デフォルト値 |
説明 |
|
|---|---|---|---|
computeStep |
適用不可 |
アルゴリズムを初期化するために必要なパラメーターです。次のいずれか。
|
|
algorithmFPType |
double |
アルゴリズムが中間計算に使用する浮動小数点の型。float または double を指定できます。 |
|
method |
defaultDense |
線形回帰訓練に利用可能なメソッド。
|
|
interceptFlag |
true | β0j を計算する必要があることを示すフラグ。 |
|
分散処理モードの線形回帰訓練では、以下の図のように 2 ステップの計算スキーマを使用します。
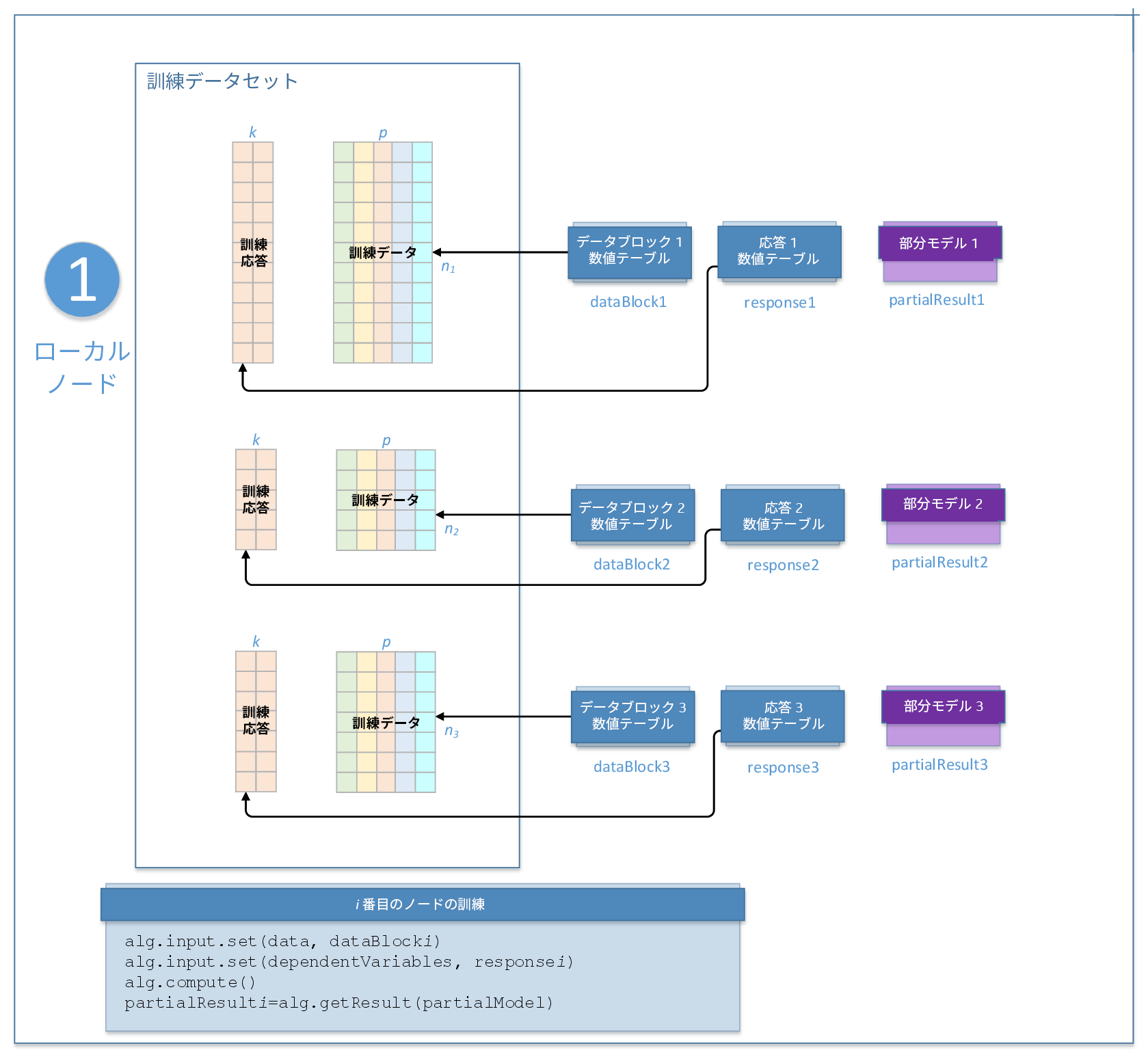
このステップの線形回帰訓練の入力は次のとおりです。入力 ID をパラメーターとして、アルゴリズムの入力を提供するメソッドに渡します。詳細は、「アルゴリズム」を参照してください。
入力 ID |
入力 |
|
|---|---|---|
data |
ローカルノードの i 番目のデータブロックを表す ni x p 数値テーブルのポインター。このテーブルは、NumericTable の派生クラスのオブジェクトです。 |
|
dependentVariables |
i 番目のデータブロックに関連付けられた応答を含む ni x k 数値テーブルのポインター。このテーブルは、NumericTable の派生クラスのオブジェクトです。 |
|
このステップで、線形回帰訓練は次の結果を計算します。結果 ID をパラメーターとして、アルゴリズムの結果にアクセスするメソッドに渡します。詳細は、「アルゴリズム」を参照してください。
結果 ID |
結果 |
|
|---|---|---|
partialModel |
i 番目のデータブロックに対応する部分線形回帰モデルのポインター。結果は Model クラスのオブジェクトです。 |
|
ステップ 2 - マスターノード
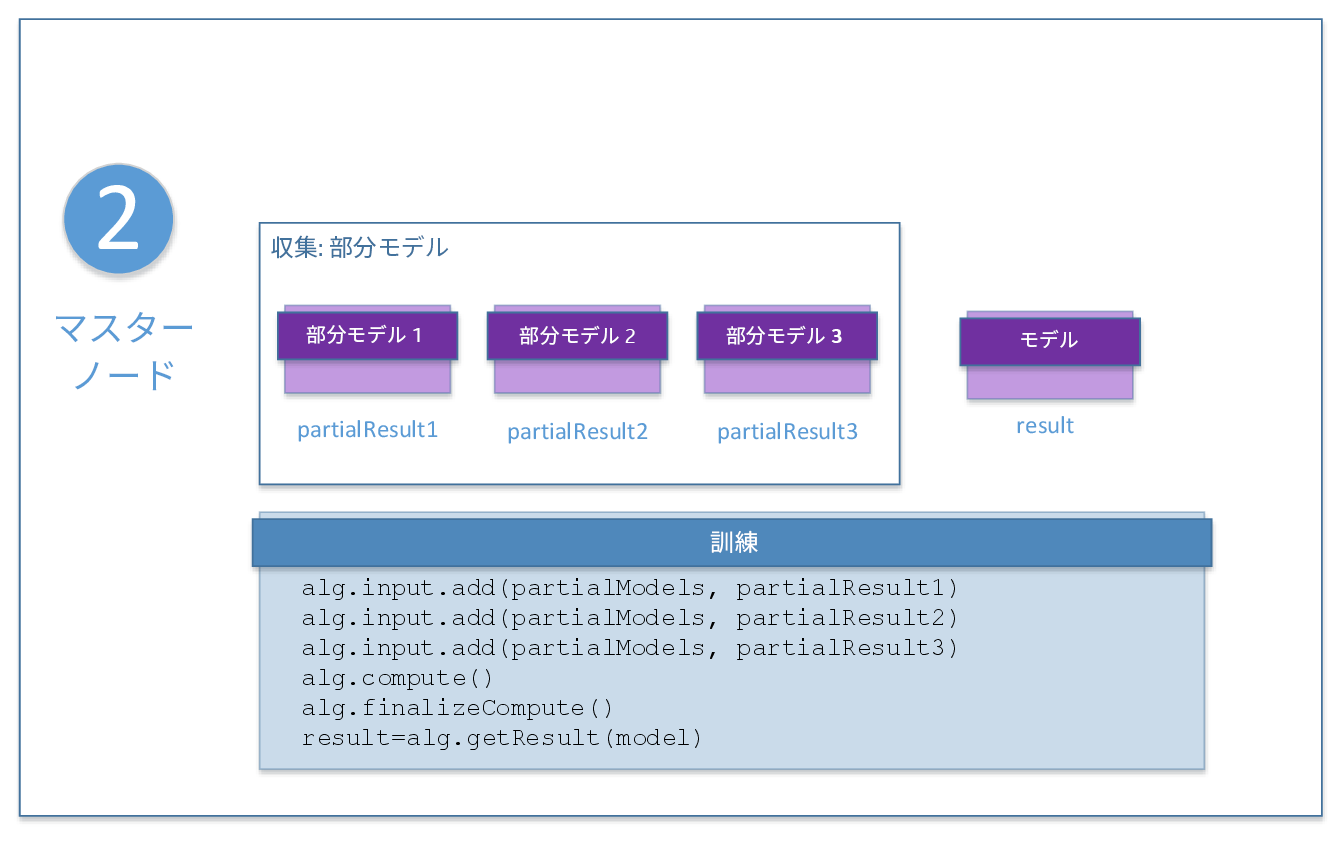
このステップの線形回帰訓練の入力は次のとおりです。入力 ID をパラメーターとして、アルゴリズムの入力を提供するメソッドに渡します。詳細は、「アルゴリズム」を参照してください。
入力 ID |
入力 |
|
|---|---|---|
partialModels |
ステップ 1 でローカルノードで計算された部分モデルのコレクション。Model クラスのオブジェクトを含むコレクションです。 |
|
このステップで、線形回帰訓練は次の結果を計算します。結果 ID をパラメーターとして、アルゴリズムの結果にアクセスするメソッドに渡します。詳細は、「アルゴリズム」を参照してください。
結果 ID |
結果 |
|
|---|---|---|
model |
訓練されている線形回帰モデルのポインター。結果は Model クラスのオブジェクトです。 |
|
サンプル
インテル® DAAL ディレクトリーの次のサンプルを参照してください。
C++:
- ./examples/cpp/source/linear_regression/linear_regression_norm_eq_distributed.cpp
- ./examples/cpp/source/linear_regression/linear_regression_qr_distributed.cpp
Java*:
- ./examples/java/source/com/intel/daal/examples/linear_regression/LinearRegressionNormEqDistributed.java
- ./examples/java/source/com/intel/daal/examples/linear_regression/LinearRegressionQRDistributed.java